 |
ANTS HABITAT MAPPING USING REMOTE SENSING AND GIS
Ramachandra T. V. and Ajay N. |
 |
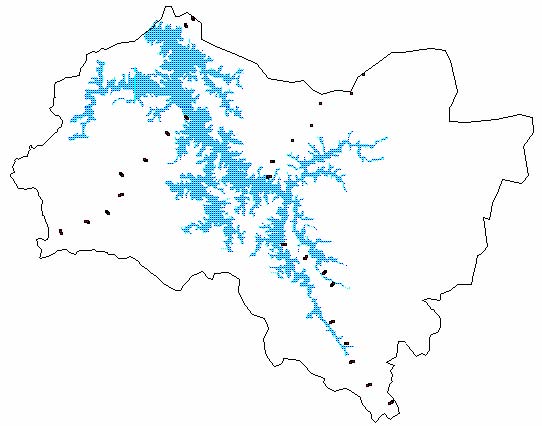
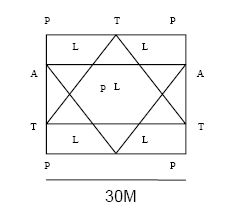
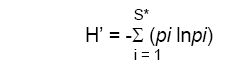
Materials and Methods Land cover analysis was done to delineate the areas under vegetation and soil (non- vegetation). The land use analysis was carried out for the region to identify the use of land, emphasizing the functional role of the land in economic activities. Land use patterns reflects the characters of a society’s interaction with the physical environment, while land cover in its narrowest sense often designates only the vegetation cover extent on the Earth’s surface, as the spectral reflectance in green band (visible range of em spectrum) and near-infrared would represent the photosynthetically active vegetation. A cloud free IRS-1C satellite multi spectral imagery of LISS III sensors with spatial resolution of 23.5m was used for the analyses. Land cover analyses were done through computation of vegetation indices which could be Slope based or distance based (depending on the landscape type - hilly, arid, etc.). The Normalized Difference Vegetation Index (NDVI) was used to delineate vegetative from the non-vegetative features. High values in a vegetation index identify pixels covered by substantial proportions of healthy vegetation. Due to inverse relationship between vegetation brightness in the red (R) and near infrared (IR) region, a normalized difference ratioing strategy can be very effective. Once the extent of vegetation cover was determined, further analyses were done to classify image with field data. FCC image was generated by merging all 3 bands, which aided in identifying the heterogeneous patches for selection of training sites. Attribute information corresponding to these training sites were collected from field using Global Positioning System (GPS). In addition to this, GPS was used to map the tree species, which were sampled along 200 m transect with 20 x 20m quadrant. Gaussian maximum likelihood classifier was used to classify the data based on the attribute data collected from field. The statistical probability of a given pixel present in a specific land use category was calculated and each pixel in the data was categorized into the land use class it most closely resembled or the probability of occurrence. SAMPLING STRATEGY FOR ANTS: Fig 2: Sampling location for ants (Each sampling plot [30x30 sq m] is represented by a dot) SAMPLING METHODS: Terrestrial and arboreal baits were placed using 70% honey, tuna fish and fried coconut. Terrestrial baits (T) were placed on the ground (Fig 3) and the arboreal baits were tied to a tree at a height of 6 ft from the ground. A 10cm long cylindrical tube containing 90% ethyl alcohol with 3 drops of glycerin was used for a pitfall trap (P). A pit was dug with a mallet and the tubes were placed such that their mouth was flush with the ground. Five such pitfall traps were laid at every sample for a 24h period. The Burlese leaf litter technique was used in extracting ants from the leaf litter in four, 1x1m quadrants at each sub sample. The quadrants were placed in the four smaller quadrants (L), between the pitfall traps and baits in four directions. A visual collection was done for a period of an hour, which involved sweep net method, checking in barks, rotting logs and on leaves. From all traps insects were sorted and ants were separated for identification and preserved in 70% ethyl alcohol. Fig 3: Sampling layout ANALYSES: Evenness across habitats was computed by the Pielou's evenness index, H'/logS, S being the number of species recorded over all the sites, wherein maximum values would be when all species are equally abundant. Jaccards similarity index was used to analyze extent of similarity between habitats with respect to ant fauna. It is calculated as, Oij = c/a + b – c; where, Oij = overlap between habitats; c = no of species overlapping between i and j; a = no of species in habitat i; b = no of species in habitat j (Pramod, et al, 1997). The maps of the study area were digitized using Mapinfo 5.0 (creation of vector layers). IDRISI was used to determine the NDVI index and also to arrive at a second level classification using a supervised classification approach - Maximum Likelihood Classifier (raster analyses). Geographic Resource Analysis Support System (GRASS) was used to build the 3-D image depicting high and low species richness of ants for the entire study area. |

| E-mail | Sahyadri | ENVIS | GRASS | Energy | CES | CST | CiSTUP | IISc | E-mail |