NAME
r3.in.lidar - Creates a 3D raster map from LAS LiDAR points using univariate statistics.KEYWORDS
raster3d, import, LIDAR, statistics, conversion, aggregation, binningSYNOPSIS
Flags:
- -d
- Use base raster actual resolution instead of computational region
- -v
- Use only valid points
- Points invalid according to APSRS LAS specification will be filtered out
- -o
- Override projection check (use current location's projection)
- Assume that the dataset has same projection as the current location
- -p
- Print LAS file info and exit
- -s
- Scan data file for extent then exit
- -g
- In scan mode, print using shell script style
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name
- LAS input file
- LiDAR input file in LAS format (*.las or *.laz)
- file=name
- File containing names of LAS input files
- LiDAR input files in LAS format (*.las or *.laz)
- n=name
- Count of points per cell
- Name for output 3D raster map
- sum=name
- Sum of values of point intensities per cell
- Name for output 3D raster map
- mean=name
- Mean of point intensities per cell
- Name for output 3D raster map
- proportional_n=name
- 3D raster map of proportional point count
- Point count per 3D cell divided by point count per vertical column
- proportional_sum=name
- 3D raster map of proportional sum of values
- Sum of values per 3D cell divided by sum of values per vertical column
- return_filter=string
- Only import points of selected return type
- If not specified, all points are imported
- Options: first, last, mid
- class_filter=integer[,integer,...]
- Only import points of selected class(es)
- Input is comma separated integers. If not specified, all points are imported.
- base_raster=name
- Subtract raster values from the z coordinates
- The scale for z is applied beforehand, the filter afterwards
- zscale=float
- Scale to apply to Z data
- Default: 1.0
- intensity_range=min,max
- Filter range for intensity values (min,max)
- intensity_scale=float
- Scale to apply to intensity values
- Default: 1.0
Table of contents
DESCRIPTION
The r.in.lidar module is very similar to the r3.in.lidar module and many parts of its documentation apply also for r3.in.lidar.
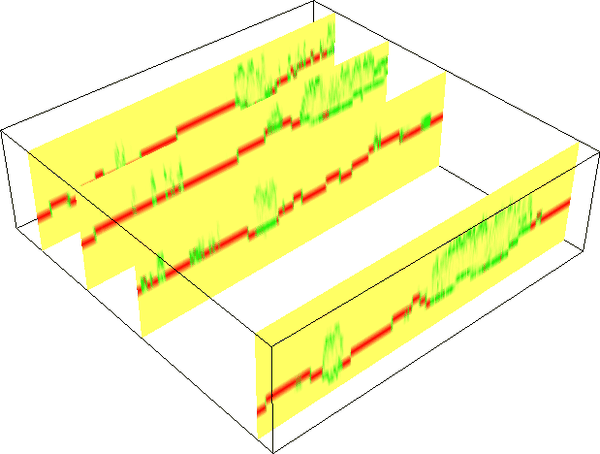
Figure: Proportional count of points per 3D cell. When 50% of all points in a vertical column fall into a given 3D cell, the value is 0.5. Here, the green color was assigned to 0.5, red to 1 and yellow to 0. The figure shows vertical slices and green color indicates high vegetation while red color indicates bare ground.
NOTES
- This module is new and partially experimental. Please don't rely on its interface and be critical towards its outputs. Please report issues on the mailing list or in the bug tracker.
- No reprojection is performed, you need to reproject ahead or use GRASS Location which has the right coordinate system which fits with the data.
- Some temporary maps are created but not cleaned up. Use of --overwrite might be necessary even when not desired.
- Expects points to have intensity and causing random (undefined) result for related outputs (sum, mean, proportional_sum) when the intensity is not present but the outputs were requested.
EXAMPLES
Basic import of the data
Set the region according to a 2D raster and adding 3D minimum (bottom), maximum (top) and vertical (top-bottom) resolution.g.region rast=secref b=80 t=160 tbres=5 -p3
r3.in.lidar input=points.las n=points_n sum=points_sum \
mean=points_mean proportional_n=points_n_prop \
proportional_sum=points_sum_prop
Point density vertical structure reduced to the terrain
Create ground raster:r.in.lidar input=points.las output=ground method=mean class_filter=2
g.region rast=secref b=0 t=47 -p3
r3.in.lidar input=points.las n=points_n sum=points_sum \
mean=points_mean proportional_n=points_n_prop \
proportional_sum=points_sum_prop \
base_raster=ground
Complete workflow for vertical structure analysis
Compute the point density of points in 2D while setting the output extent to be based on the data (-e) and the resolution set to a relatively high number (here 10 map units, i.e. meters for metric projections).r.in.lidar input=points.las output=points_n method=n -e resolution=10
The class_filter option should be also provided if only part of the points is analyzed, for example class_filter=3,4,5 would be used for low, medium, and high vegetation if the LAS file follows the usedstandard ASPRS class numbers.
The resolution should be suitable for computing digital elevation model which will be computed in the next steps. Once you decided on the resolution, you can use the 2D raster to set the computational region extent and resolution:
g.region raster=points_n -p3
r.in.lidar input=points.las output=ground_mean method=mean class_filter=2
Convert the raster to vector point resulting in a decimated point cloud:
v.to.rast input=ground_mean type=point output=ground_decimated use=z
v.surf.rst input=ground_decimated elevation=ground
r.in.lidar input=points.las method=max output=veg_max class_filter=3,4,5 base_raster=ground -d
g.region rast=secref b=0 t=40 res=1 res3=1 -p3
Finally, we perform the 3D binning where we count number of points per cell (voxel):
r3.in.lidar input=points.las n=n class_filter=3,4,5 base_raster=ground -d
REFERENCES
- V. Petras, A. Petrasova, J. Jeziorska, H. Mitasova (2016): Processing UAV and lidar point clouds in GRASS GIS. XXIII ISPRS Congress 2016 [ISPRS Archives, ResearchGate]
- ASPRS LAS format
- LAS library
- LAS library C API documentation
SEE ALSO
r3.in.xyz, r.in.lidar, v.in.lidar, r.to.rast3, r3.to.rast, r3.mapcalc, g.regionAUTHOR
Vaclav Petras, NCSU GeoForAll LabSOURCE CODE
Available at: r3.in.lidar source code (history)
Latest change: Thursday Feb 03 11:10:06 2022 in commit: 547ff44e6aecfb4c9cbf6a4717fc14e521bec0be
Main index | 3D raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2023 GRASS Development Team, GRASS GIS 8.2.2dev Reference Manual