NAME
i.sentinel.import - Imports Sentinel satellite data downloaded from Copernicus Open Access Hub using i.sentinel.download.KEYWORDS
imagery, satellite, Sentinel, importSYNOPSIS
Flags:
- -r
- Reproject raster data using r.import if needed
- -l
- Link raster data instead of importing
- -o
- Override projection check (use current location's projection)
- -c
- Import cloud masks
- -s
- Import cloud shadow masks
- -n
- Do not unzip SAFE-files if they are already extracted
- -p
- Print raster data to be imported and exit
- -j
- Write meta data json for each band to LOCATION/MAPSET/cell_misc/BAND/description.json
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- Name of input directory with downloaded Sentinel data
- unzip_dir=name
- Name of directory into which Sentinel zip-files are extracted (default=input)
- pattern=string
- Band name pattern to import
- pattern_file=string
- File name pattern to import
- extent=string
- Output raster map extent
- Options: input, region
- Default: input
- input: extent of input map
- region: extent of current region
- memory=integer
- Maximum memory to be used (in MB)
- Cache size for raster rows
- Default: 300
- register_output=name
- Name for output file to use with t.register
- metadata=name
- Name of directory into which Sentinel metadata json dumps are saved
- cloud_area_threshold=float
- Threshold above which areas of clouds and/or cloud shadows will be masked (in hectares)
- Default: 1
- cloud_probability_threshold=integer
- Minimum cloud probability for pixels to be masked
- Options: 0-100
- Default: 65
- cloud_output=string
- Create cloud mask as raster or vector map
- Options: vector, raster
- Default: vector
Table of contents
DESCRIPTION
The i.sentinel.import module allows importing Copernicus Sentinel products downloaded by the i.sentinel.download module.By default i.sentinel.import imports all Sentinel scene files found in the input directory. The number of scene files can be optionally reduced by the pattern_file option. In this option, a regular expression for filtering the file names should be given, e.g. "MSIL2A.*T32VNR_2019" for importing only level 2A products for tile T32VNR from 2019.
By default i.sentinel.import imports the full scene. Optionally, the import can be reduced to the computational region extent with extent=region.
Note that in the case that spatial reference system of input data differs from GRASS GIS location, the input data need to be reprojected with r.import. To speed up this process, a higher than default value can be specified for the memory option.
In order to ignore insignificant mismatch of the spatial reference systems, the projection check can be suppressed with the -o flag.
Optionally input data can be linked by r.external when -l is given. Note that linking data requires that Sentinel input data and GRASS location have the same spatial reference system (e.g., the same UTM zone).
The number of imported Sentinel bands can be optionally reduced by the pattern option. Below an overview of the Sentinel-2 MSI band spatial resolutions:
| Spatial resolution [m] | S2 Bands |
|---|---|
| 10 | B02, B03, B04, B08 |
| 20 | B05, B06, B07, B8A, B11, B12 |
| 60 | B01, B09, B10 |
Level 2A (L2A) products for Sentinel-2 come with a scene classification (SCL layer) at 20m and 60m resolution, that e.g. can be used for masking clouds and snow and is also imported by default.
For each imported band both scene and band specific metadata on geometric conditions as well as quality indicators are written into the map history (r.support). In addition, the scene name is stored as source1 and the imported or linked file name as source2. Also, sensing time is written into the timestamp of the map. After import, the metadata can be retrieved with r.info -e as shown below.
|
SATELLITE=S2B CLOUDY_PIXEL_PERCENTAGE=1.250696 DEGRADED_MSI_DATA_PERCENTAGE=0 NODATA_PIXEL_PERCENTAGE=58.089572 SATURATED_DEFECTIVE_PIXEL_PERCENTAGE=0.000000 DARK_FEATURES_PERCENTAGE=4.668012 CLOUD_SHADOW_PERCENTAGE=0.572569 VEGETATION_PERCENTAGE=45.350337 NOT_VEGETATED_PERCENTAGE=1.179313 WATER_PERCENTAGE=44.793952 UNCLASSIFIED_PERCENTAGE=2.184867 MEDIUM_PROBA_CLOUDS_PERCENTAGE=0.620685 HIGH_PROBA_CLOUDS_PERCENTAGE=0.570162 THIN_CIRRUS_PERCENTAGE=0.059849 SNOW_ICE_PERCENTAGE=0.000253 RADIATIVE_TRANSFER_ACCURACY=0.0 WATER_VAPOUR_RETRIEVAL_ACCURACY=0.0 AOT_RETRIEVAL_ACCURACY=0.0 MEAN_SUN_ZENITH_GRID_ANGLE=63.9790718336484 MEAN_SUN_AZIMUTH_GRID_ANGLE=180.4378695652174 MEAN_SUN_ZENITH_ANGLE=63.9790721741866 MEAN_SUN_AZIMUTH_ANGLE=180.437882291128 ZENITH_ANGLE_5=9.9540335513936 AZIMUTH_ANGLE_5=295.354861828927 |
NOTES
By register_file option i.sentinel.import allows creating a file which can be used to register imported imagery data into space-time raster dateset (STRDS) by t.register. Note that currently a register file can be created only for Sentinel-2 data. See example below.
Importing cloud and cloud shadow masks
If -c flag is given, a cloud mask with suffix _MSK_CLOUDS is additionally created. For Level2A products this mask is based on the Level2A inherent cloud probability layer and can be controlled by specifying the cloud_* options. The default cloud_probability_threshold applied to the probability layer is set to 65%, which corresponds to the classification of such areas as most likely cloudy according to the ESA classification scheme used for the creation of the SCL layer. The SCL Layer itself is used if shadow masks should be included in the _MSK_CLOUDS layer. This requires to call the -s flag, which adds shadows as part of the _MSK_CLOUDS output layer. The cloud_area_threshold parameter allows to exclude small areas of cloud and shadow cover, which in case of vector outputs tend to increase the computational speed. Note that the resolution of the _MSK_CLOUDS layer (20m) is determined by the native resolution of the cloud probability layer and the SCL layer, respectively. For Level1C products a simplified cloud mask will be created since cloud probability and SCL layer are not available. Note that for Level1C products only clouds and no shadows can be masked and specifying the cloud_probability_threshold does not influence the masking procedure. Only the parameters cloud_area_threshold and cloud_output will be applied during the import of cloud masks for Level1C products.
Metadata import
By using the -j flag the band metadata are additionally stored in JSON format (in the current mapset under cell_misc). These metadata JSON files are supported by i.sentinel.mask.EXAMPLES
List Sentinel bands
At first, print list of raster files to be imported by -p. For each file also projection match with current location is printed including detected input data EPSG code:i.sentinel.import -p input=data data/S2B_MSIL1C_20180216T102059_N0206_R065_T32UPB_20180216T140508.SAFE/GRANULE/.../T32UPB_20180216T102059_B04.jp2 1 (EPSG: 32632) data/S2B_MSIL1C_20180216T102059_N0206_R065_T32UPB_20180216T140508.SAFE/GRANULE/.../T32UPB_20180216T102059_B07.jp2 1 (EPSG: 32632) data/S2B_MSIL1C_20180216T102059_N0206_R065_T32UPB_20180216T140508.SAFE/GRANULE/.../T32UPB_20180216T102059_B11.jp2 1 (EPSG: 32632)
Import Sentinel data
Import all Sentinel bands found in data directory and store metadata as JSON files within the GRASS GIS database directory:i.sentinel.import -j input=data
Limit import to only to 4th and 8th bands:
i.sentinel.import -j input=data pattern='B0(4|8)'
Limit import to all bands with 10m resolution (excluding AOT, WVP, ... bands):
i.sentinel.import -j input=data pattern='B0(2|3|4|8)_10m'
Limit import to only selected bands with 10m and 20m resolution (excluding AOT, WVP, ... bands):
i.sentinel.import -j input=data pattern='B(02_1|03_1|04_1|08_1|11_2)0m'
Limit import to all bands with 10m and 20m resolution (excluding AOT, WVP, ... bands):
i.sentinel.import -j input=data pattern='_B((0[2348]_1)|(0[567]|8A|11|12)_2)0m'
Import cloud and shadow mask:
i.sentinel.import input=data i.sentinel.import input=data -c -s i.sentinel.import input=data cloud_probability_threshold=25 cloud_area_threshold=10 -c -s
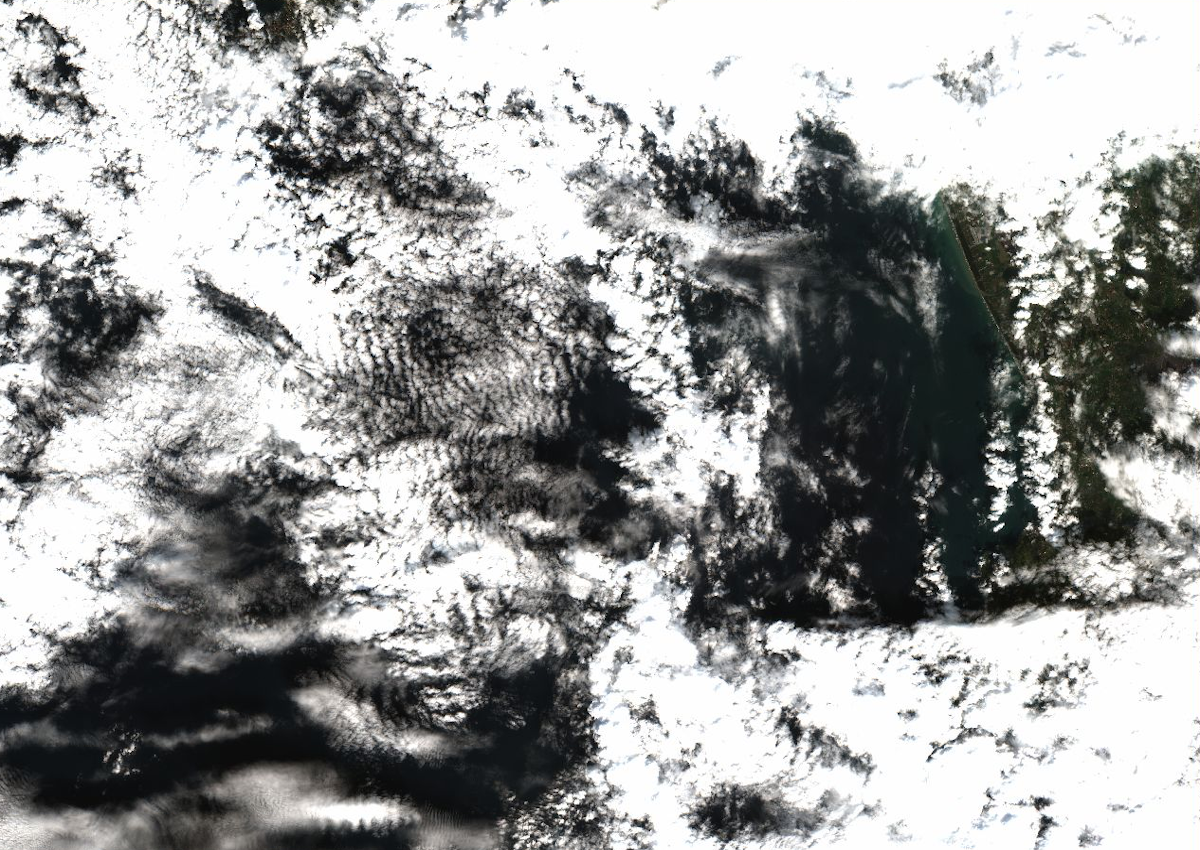 Fig: S2 L2-A imagery without cloud mask (example: T33TVE_20210313T095029, Italy) |
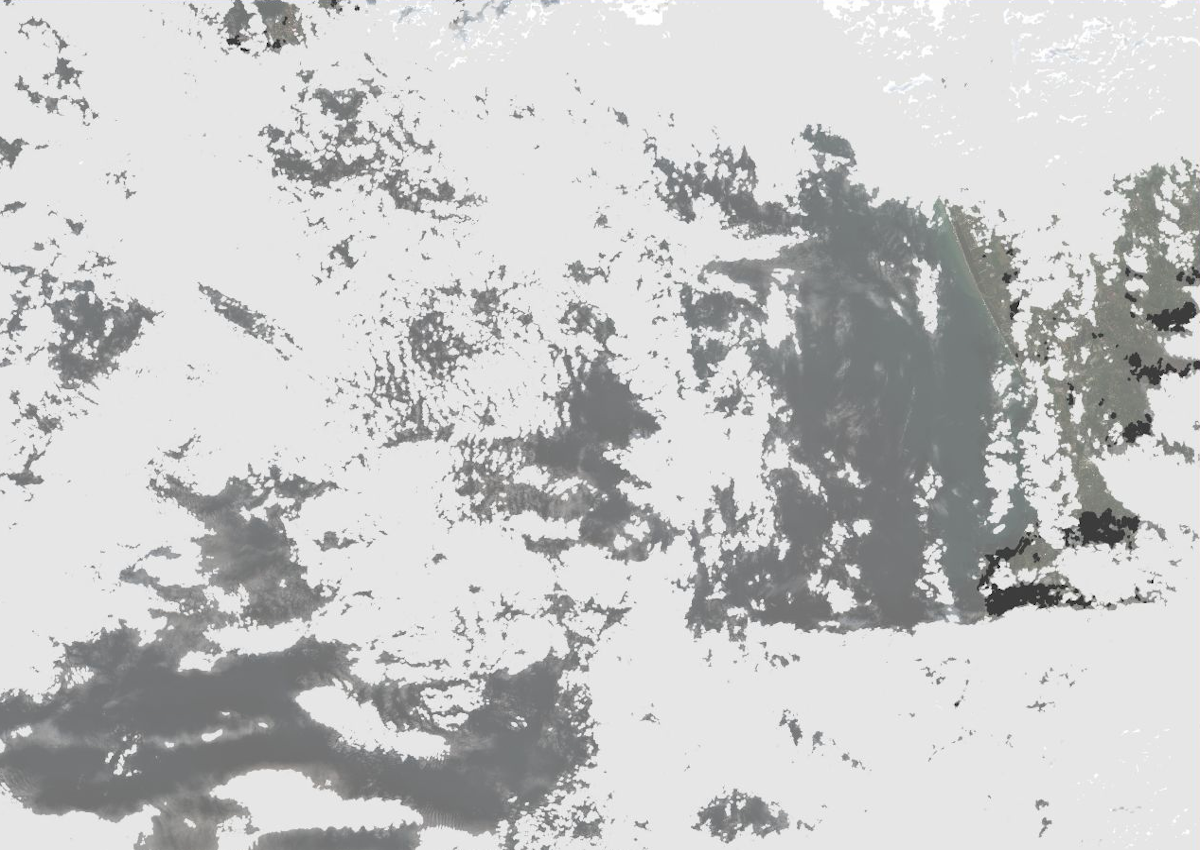 Fig: Cloud (ligthgrey) and shadow (darkgrey) mask (default options) |
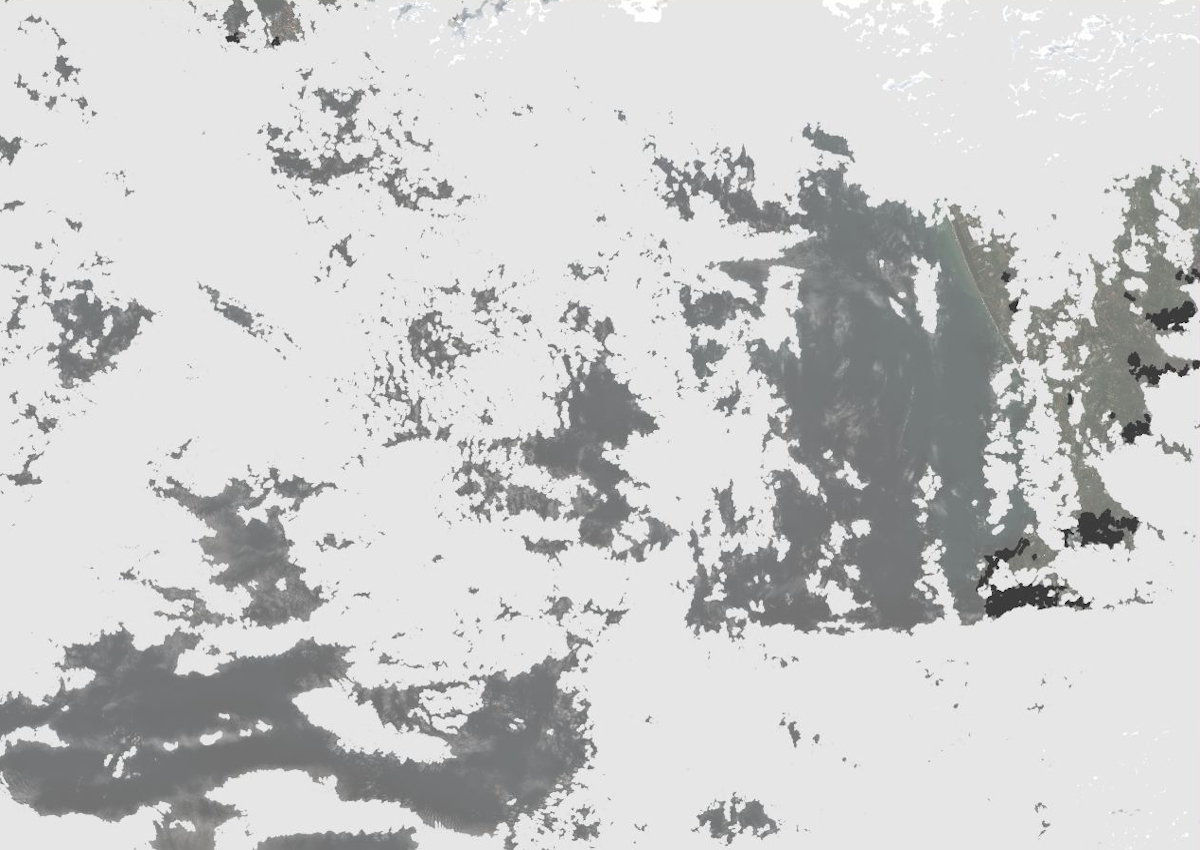 Fig: Cloud (ligthgrey) and shadow (darkgrey) mask (lower probability threshold and higher area threshold) |
Link data from specific UTM zone while ignoring projection check
i.sentinel.import -l -o -j input=data pattern_file="_T32"
Limit import to only bands 3 and 4 from level 2A products for tile T32VNR in 2019
i.sentinel.import -j input=data pattern_file="MSIL2A.*T32VNR_2019" pattern='B(03|04)'
Limit import to only bands 3 and 4 from level 2A products for tile T32VNR in 2019, unzip to directory "safefiles_dir":
i.sentinel.import -j input=data unzip_dir=safefiles_dir pattern_file="MSIL2A.*T32VNR_2019" pattern='B(03|04)'
Register imported Sentinel data into STRDS
i.sentinel.import -j input=data register_output=t_register.txt # register imported data into existing STRDS t.register input=sentinel_ds file=t_register.txt
# register file produced by stable GRASS GIS 7.8 version T33UVR_20181205T101401_B05|2018-12-05 10:16:43.275000 T33UVR_20181205T101401_B03|2018-12-05 10:16:43.275000 T33UVR_20181205T101401_B06|2018-12-05 10:16:43.275000 ... # register file produced by development GRASS GIS 7.9 version T33UVR_20181205T101401_B05|2018-12-05 10:16:43.275000|S2_5 T33UVR_20181205T101401_B03|2018-12-05 10:16:43.275000|S2_3 T33UVR_20181205T101401_B06|2018-12-05 10:16:43.275000|S2_6
SEE ALSO
Overview of i.sentinel toolseti.sentinel.download, i.sentinel.preproc, i.sentinel.mask, r.import, r.external, v.import
See also GRASS GIS Workshop in Jena for usage examples.
AUTHORS
Martin Landa, GeoForAll Lab, CTU in Prague, Czech Republic with support of OpenGeoLabs companySOURCE CODE
Available at: i.sentinel.import source code (history)
Latest change: Sunday Jan 29 20:28:03 2023 in commit: 0d67db05ee53f1bec0c4bd5938bbd28942b5866a
Main index | Imagery index | Topics index | Keywords index | Graphical index | Full index
© 2003-2023 GRASS Development Team, GRASS GIS 8.3.dev Reference Manual