Note: This addon document is for an older version of GRASS GIS that will be discontinued soon. You should upgrade your GRASS GIS installation, and read the current addon manual page.
NAME
r.viewshed.exposure - Visual exposure to defined exposure source.Computes visual exposure to defined exposure source using weighted parametrised cummulative viewshed analysis.
KEYWORDS
raster, viewshed, line of sight, LOS, visual exposureSYNOPSIS
Flags:
- -c
- Consider the curvature of the earth (current ellipsoid)
- -r
- Consider the effect of atmospheric refraction
- --overwrite
- Allow output files to overwrite existing files
- --help
- Print usage summary
- --verbose
- Verbose module output
- --quiet
- Quiet module output
- --ui
- Force launching GUI dialog
Parameters:
- input=name [required]
- Name of input digital surface raster map
- Name of input raster map
- output=name [required]
- Name of output raster map of visual exposure
- Name for output raster map
- source=name
- Name of input raster map of exposure source
- Name of input raster map
- sourcecat=value
- Raster values to use as exposure source
- 1-
- Default: *
- sampling_points=name
- Name of input vector map of sampling points
- Or data source for direct OGR access
- weights=name
- Name of input raster map of viewshed weights
- Name of input raster map
- observer_elevation=value
- Observer elevation above the ground
- 0.0-
- Options: 0.0-
- Default: 1.5
- range=value
- Exposure range
- 0.0- , -1 for infinity
- Options: 0.0-
- Default: 100
- function=name
- Viewshed parametrisation function
- Binary, Distance_decay, Fuzzy_viewshed, Visual_magnitude, Solid_angle
- Options: Binary, Distance_decay, Fuzzy_viewshed, Visual_magnitude, Solid_angle
- Default: Distance_decay
- b1_distance=value
- Radius around the observer where clarity is perfect. Used in fuzzy viewshed function.
- Default: 10
- sample_density=value
- Density of sampling points
- 0.0-100.0
- Options: 0.0-100.0
- Default: 25
- seed=value
- Random seed, default [random]
- 0-
- Options: 0-
- refraction_coeff=value
- Refraction coefficient
- 0.0-1.0
- Options: 0.0-1.0
- Default: 0.14286
- memory=value
- Amount of memory to use in MB
- 1-
- Options: 1-
- Default: 500
- nprocs=value
- Number of cores to use in parallelisation
- 1-
- Options: 1-
- Default: 1
Table of contents
DESCRIPTION
r.viewshed.exposure computes visual exposure to given exposure source(s) using weighted (optional) parametrised (optional) cumulative viewshed.The algorithm
The processing workflow of the module consists of five steps:- Random sampling of exposure source raster map with vector points,
- Calculating binary viewshed for each exposure source point,
- Optional parametrisation of the binary viewshed,
- Optional weighting of the (parametrised) viewshed,
- Cumulating the (weighted) (parametrised) viewsheds.
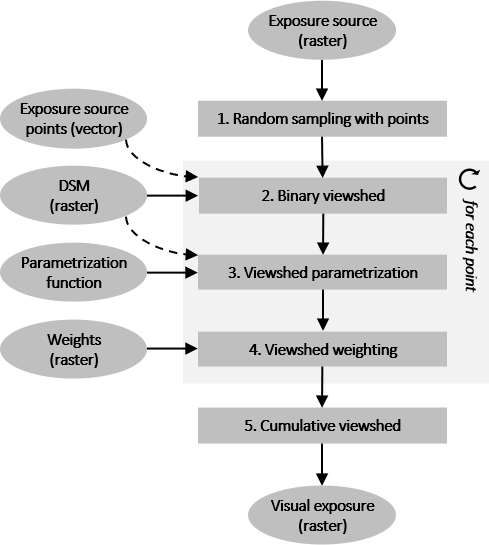
Processing workflow
1. Random sampling of exposure source raster map with vector points
To improve computational efficiency, the exposure source raster map is randomly sampled with defined density (0-100%; option sample_density). In general, lower sampling densities lead to lower accuracy, higher uncertainty of the result and lower processing time, while higher sampling densities lead to higher accuracy, lower uncertainty of the result and longer processing time. Alternatively, it is possible to replace the exposure source raster map with own vector map of exposure source points (option sampling_points).2. Binary viewshed for each exposure source point
A binary viewshed for each exposure source point is calculated using r.viewshed module. The height of exposure source point above the surface is 0m. The height of observer point (exposure receiver) above the surface is specified by option observer_elevation. Viewshed radius (range of visual exposure) is specified by option max_distance.3. (optional) Parametrisation of the binary viewshed
The module supports different parametrization functions to better reflect human visual perspective by accounting for the variable contribution of the exposure source pixels to visual exposure depending on their distance, slope and aspect relative to the observer (option function). Four parametrisation functions are implemented: distance decay function, fuzzy viewshed function, visual magnitude function and solid angle function.In distance decay function, the contribution of an exposure source pixel xi to visual exposure at the observer pixel decreases in proportion to the square of distance between the exposure source pixel and the observer: D(xi) = A/v2; A is the area of the exposure source pixel, v is the distance between the exposure source pixel and the observer. See Grêt-Regamey et al. (2007) and Chamberlain and Meitner (2013) for more details.
In fuzzy viewshed function, the contribution of an exposure source pixel xi to visual exposure at the observer pixel depends on the distance between the exposure source pixel and the observer and the radius of perfect clarity. See Fisher (1994) and Ogburn (2006) for more details.
In visual magnitude function, the contribution of an exposure source pixel xi to visual exposure at the observer pixel depends on the pixel's slope, aspect and distance relative to the observer. See Chamberlain and Meitner (2013) for more details.
In solid angle function, the contribution of an exposure source pixel xi to visual exposure at the observer pixel is calculated as a solid angle, i.e. the area (in sterradians) of the observer's eye retina covered by the exposure source pixel. See Domingo-Santos et al. (2011) for more details.
4. (optional) Weighting of the (parametrised) viewshed
Weighting of the individual (parametrised) viewsheds enables modelling variable intensities of the exposure sources. The individual viewsheds are multiplied by values extracted from the weights raster map (option weights) at the exposure source points.5. Cumulating the (weighted) (parametrised) viewsheds
After each iteration, the partial viewsheds are cumulated (added), resulting in a raster of (weighted) (parametrised) cumulative viewshed. This raster represents visual exposure to the exposure source.Memory and parallel processing
Options memory specifies the amount of memory allocated for viewshed computation. Option nprocs specifies the number of cores used in parallel processing. In parallel processing, the computation of individual viewsheds is randomly distributed across the specified cores.EXAMPLES
Computation of visual exposure to major roads in South-West Wake county, North Carolina. Input data are a terrain model and a raster map of major roads from NC dataset. Viewshed parametrisation function is set to none (example 1) and solid angle (example 2). Sampling density is set to 50%, exposure range to 2km.# set computation region to terrain model g.region raster=elevation@PERMANENT # calculate visual exposure # no viewshed parametrisation function (binary viewshed) r.viewshed.exposure input=elevation@PERMANENT output=exposure_roadsmajor_b source=roadsmajor@PERMANENT observer_elevation=1.50 max_distance=2000 sample_density=50 memory=5000 nprocs=25 # calculate visual exposure # solid anfle viewshed parametrisation function r.viewshed.exposure input=elevation@PERMANENT output=exposure_roadsmajor_s source=roadsmajor@PERMANENT observer_elevation=1.50 max_distance=2000 function=solid_angle sample_density=50 memory=5000 nprocs=25 # scale solid angle values for visualisation purposes # (see Domingo-Santos et al., 2011) r.mapcalc expression=exposure_roadsmajor_s_rescaled = if(exposure_roadsmajor_s@user1>=0.2*3.1416,1,1/ (-1* log(exposure_roadsmajor_s@user1 /(2*3.1416))))
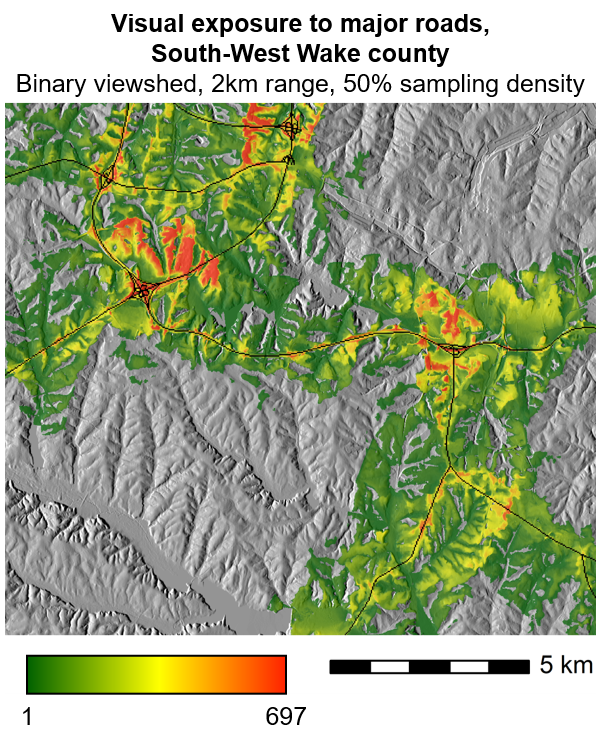
Example of r.viewshed.exposure (1)
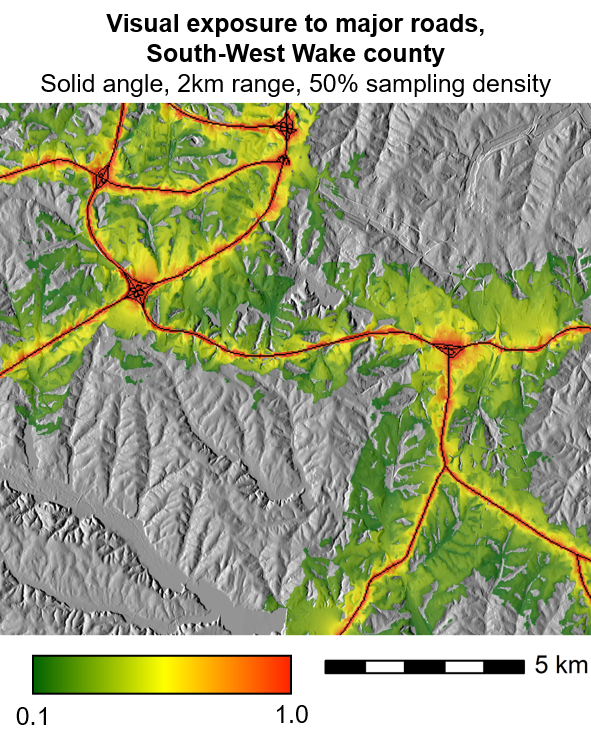
Example of r.viewshed.exposure (2)
TODO
- Implement variable exposure source height.
- Implement possibility to switch between absolute and relative values of visual exposure (now absolute).
REFERENCES
- Cimburova, Z., Blumentrath, S., 2022. Viewshed-based modelling of visual exposure to urban greenery - an efficient GIS tool for practical applications. Landscape and Urban Planning 222, 104395. https://doi.org/10.1016/j.landurbplan.2022.104395
- Chamberlain, B.C., Meitner, M.J., 2013. A route-based visibility analysis for landscape management. Landscape and Urban Planning 111, 13-24. https://doi.org/10.1016/j.landurbplan.2012.12.004
- Domingo-Santos, J.M., de Villarán, R.F., Rapp-Arrarás, Í., de Provens, E.C.-P., 2011. The visual exposure in forest and rural landscapes: An algorithm and a GIS tool. Landscape and Urban Planning 101, 52-58. https://doi.org/10.1016/j.landurbplan.2010.11.018
- Fisher, P., 1994. Probable and fuzzy models of the viewshed operation, in: Worboys, M.F. (Ed.), Innovations in GIS. Taylor & Francis, London, pp. 161-176.
- Grêt-Regamey, A., Bishop, I.D., Bebi, P., 2007. Predicting the scenic beauty value of mapped landscape changes in a mountainous region through the use of GIS. Environment and Planning B: Planning and Design 34, 50-67. https://doi.org/10.1068/b32051
- Ogburn, D.E., 2006. Assessing the level of visibility of cultural objects in past landscapes. Journal of Archaeological Science 33, 405-413. https://doi.org/10.1016/j.jas.2005.08.005
SEE ALSO
r.viewshed, r.viewshed.cva, r.surveyAUTHORS
Zofie Cimburova, NINAStefan Blumentrath, NINA
SOURCE CODE
Available at: r.viewshed.exposure source code (history)
Latest change: Wed Apr 20 22:27:07 2022 in commit: bd38a29f2edf366637d8f34a143e309b1089e1a1
Note: This addon document is for an older version of GRASS GIS that will be discontinued soon. You should upgrade your GRASS GIS installation, and read the current addon manual page.
Main index | Raster index | Topics index | Keywords index | Graphical index | Full index
© 2003-2023 GRASS Development Team, GRASS GIS 7.8.8dev Reference Manual