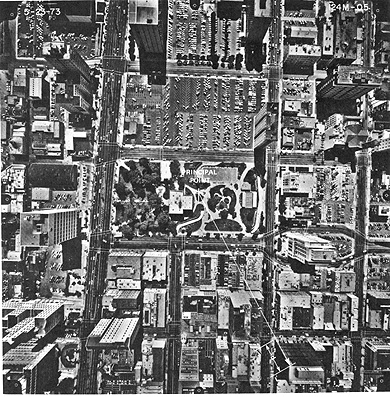
We can measure heights of surface features (e.g., tall trees and buildings) and relief by various photogrammetric techniques. Consider for example, determining the height, h, of a tall building that lies near the edge of a single aerial photograph. If that photo was taken vertically, i.e., looking straight down, then its center lies at the nadir (the vertical line from camera perpendicular to a surface point directly beneath [assumed to be flat ]). In that instance, the nadir coincides with the principal point (p.p.) in the photo, which is the intersection of the lens' optical axis (as though extended) and the ground, so that the p.p. is also the true center of the photo. That point becomes off-center, if the photo (and optical axis) is non-vertical. If the building were to lie close to the p.p., its top and bottom would appear to coincide in the photo. If it is well away from that point at some radial distance, r, towards the edge, its viewed state at a slant would have the top displaced further away from the p.p. than the bottom by some amount measurable in the photo as, d. For an aircraft height, H, (calculable from the scale if we know a ground distance), the value of h is just, h = (d/r) x (H). We can illustrate this approach with a large scale, low camera altitude aerial photo of the downtown area of Long Beach, California (from Sabins, 1987; courtesy J. Van Eden), in which the lateral tilt of tall buildings is obvious in the outer parts. Here, we drew d and r between the p.p. and one of the buildings near the edge:
11-11: Using this figure, determine the height h of the building to which are drawn white arrows to distances d (photo displacement from bottom to top) and r (to building top). On the actual photo (not your screen) d = 0.5 inch and r = 3.0 inches. Scale of the photo is 1:3600. Aircraft altitude is 1800 ft. ANSWER
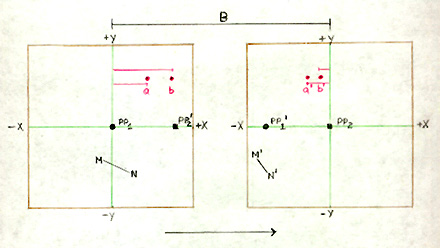
Elevations and slope lengths and inclinations can be determined from stereo photo pairs by application of parallax principles. The diagram below will serve to introduce the techniques involved. In this diagram, the two successive photos are shown as drawn apart to permit display of the geometric points or features that, in actuality would be common to both, as evidenced by the amount of overlap.
Stereo parallax (see also
page 11-3) is actually
a physical condition that refers to the apparent displacement of a point or a
feature of some height in an photo or image caused by a shift in the position
of observation: This will occur in aerial or space photos that have been taken
in succession (such that a stereo pair has either overlap (same flight line) or
sidelap (parallel flight lines). In the diagram above, note the position of the
principal point pp1 in the left photo. In the right photo, this first
point is now at pp1', and lies left of that photo's principal point
pp2. The position of pp2' in the left photo is at pp2,
the actual principal point for that photo.
Next, consider points a
and b that fall within the two photos and, for simplicity, are located
on a line parallel to the flight line (arrow at bottom). In the left photo, they
are located in the upper right quadrant; in the right photo, they have been shifted
to the upper left quadrant and the spacing or separation between them is, in this
example, less. The shifts can be measured on each photo in terms of units of x
and y chosen as lengths (e.g., millimeters) in a coordinate system that places
0 (zero) at the principal points. The two red horizontal lines to a and
b can be read as the x values (no numbers given in this general diagram).
(Note that x and y can have positive or negative values.) Because a and
b are in different locations (and different distances from the principal
points) in the two photos, their separation is not the same in the photo pair
(this is true for M and N as well; in general the parallax effect and the displacement
from the principal point that increase with distance from the point, as suggested
in the photo at the top of the page, will cause separations to vary).
In this scheme, the parallax
P for the point a is Pa = xa - xa' and
for Pb = xb - xb'. Now, the height at point a,
ha can be determined if three variables are fixed: 1) the actual ground
distance, known as the air base B, between the two principal points (determinable
if image scale is known), 2) the height H of the aircraft, and 3) the focal length
f of the aerial camera. Then, this equation applies:
In the same way, the height
of point b
is determined. Then the relief
is just the elevation difference between the higher and lower points.
Since H and f control the
photo scale, these values plus the appropriate parallaxes and the air base B are
sufficient to establish the actual distance from the principal point of any location
in one of the photos. For the point at a, the X and Y distances are given
by Xa = B(xa/Pa and Ya = B(ya/pa.
Similar equations hold for point b. The slope angle Θ between
points a and b is just the angle whose tangent is ha/hb,
where a is found to be higher than b. The real length of
the slope between a and b is determined using the Pythagorean
equation; thus: ab = [(Xa - Xb)2 -
(Ya - Yb)2]1/2.
11-12:
For the adventurous, try this question: For the inclined surface
containing separated points M and N on a slope whose heights or relief we want
to determine, we measure the distance (in the direction parallel to the flight
line) on one photo between the base (here, point N which is lower than
point M) of that slope and the principal point (the optical center of
a photo = nadir point if camera is on a level aircraft and points straight down).
Use the above equations to figure out the heights of points M and N in the diagram,
their coordinate positions (in millimeters) on the left photo, the actual length
of line MN, and the slope angle. Imput parameters: H = 4000 m; B = 400 m; f
= 120 mm; Xm = - 20 m; Ym = - 40 m; Xm' = -
100 m; Xn = + 30 m; Yn = - 70 m; xn' = - 80
m. This problem is calculation intensive; do this question only if you are ambitious.ANSWER
It is also possible to
calculate height differences (relief) between points of different elevation
along surfaces from stereo pairs by using a variant of the parallax method.
This formula applies: h = (H) dP/(P + dP). P is the absolute stereo
parallax. The dP term is the differential parallax, which is the difference
between the absolute stereo parallax at the top and at the bottom (base) of
the feature or point being measured in the pair.
We find the differential parallax
by measuring the distance between the base and the top of the feature, or between
two proximate terrain points at different elevations on a slope, that we locate
in each of the two photos when the pair is in optimum alignment for stereo viewing.
Then, dP is the numerical difference between the two distance values (x2
- x1), which is different in each of the photo pairs.
We can optically find the
values of P and dP by using special devices, such as a stereometer, a parallax
wedge, or, most commonly, a parallax bar. Each uses a variant of the "floating
point" method in which reference marks–dots or crosses–are visible
when we view the aligned photos under a mirror stereoscope. We place the parallax
bar on the photo plane so that a fixed mark over one photo coincides with a
movable mark (fused visibly in the stereo view) by turning a screw drive that
translates that mark into coincidence. We then read the value of dP from a graduated
scale. When we do this for a number of points, then, we can calculate heights
and relief values for parts of the map. These become absolute values (elevations),
if we reference the points to benchmarks. 11-13:
A stereo pair was obtained from a photo mission flown at 2000 meters.
We wish to determine the height of a water tower (storage tank on legs).The
photo base length P between the two photos when properly placed for effective
stereo viewing is 70 mm. The differential parallax dP for the tower, as measured
by a stereometer, is 0.4 mm. What is the height? ANSWER
Using the above devices
to specify a large enough number of elevation points in stereo photos to permit
contouring is difficult and tedious. Instead, we apply sophisticated optical-mechanical
stereoplotters. These devices use two or three movable projectors that pass
light through stereo pairs made into glass-mounted film diapositives placed
onto a tracing table (platen) which we can raise and lower. We produce a 3-D
image or stereomodel, which an outside observer can view by some filter method.
For black and white photos, we do this by the anaglyph method, in which we project
one photo through a red filter and the other a cyan filter and then view them
through eyeglasses with corresponding color filters. We project a small point
of light or dot onto the stereomodel. When the dot appears to coincide with
some part of the model surface (as seen through the viewer), that dot locates
a particular elevation determined by the platen height and calibrated by control
points. An experienced operator can then move the light along the model surface,
such that it always remains coincident. This motion traces a contour line. They
then raise (or lower) the platen table a fixed amount determined by the chosen
contour interval and they contour the next elevation. This process continues
until they trace the entire surface. Today, analytical stereoplotters are capable
of semi-automating the contouring through computer processing of mathematically
transformed data. ha
= H - (Bf)/Pa